At Zyvex, we are taking the first steps on the journey into the small world of nanotechnology by developing manufacturing architectures that should let us make huge numbers of miniature robotic arms, all working together to assemble miniature parts. One approach we are pursuing is called exponential assembly.
Exponential assembly is a manufacturing architecture starting with a single tiny robotic arm on a surface. This first robotic arm makes a second robotic arm on a facing surface by picking up miniature parts — carefully laid out in advance in exactly the right locations so the tiny robotic arm can find them — and assembling them. The two robotic arms then make two more robotic arms, one on each of the two facing surfaces. These four robotic arms, two on each surface, then make four more robotic arms. This process continues with the number of robotic arms steadily increasing in the pattern 1, 2, 4, 8, 16, 32, 64, etc. until some manufacturing limit is reached (both surfaces are completely covered with tiny robotic arms, for example). This is an exponential growth rate, hence the name exponential assembly.
To keep things simple, we want to keep the robotic arms simple. While a general purpose robotic arm having six degrees of free movement (much as your arms and hands have) would be able to pick up parts and position them in any orientation and position desired, such a general purpose arm is harder to make. Zyvex is considering a simpler design using robotic arms having only two rotational degrees of freedom and a gripper (see illustration). Externally provided power and computer control would make all the robotic arms on a surface operate synchronously and in parallel.
While each robotic arm would have only two degrees of freedom, the surface itself could be moved in X, Y and Z. This provides a total of five degrees of freedom for each robotic arm, with the three translational degrees of freedom being shared across all the robotic arms on a surface.
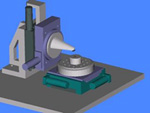
Exponential assembly can be implemented on many different length scales. Given existing manufacturing capabilities, it should be possible to implement exponential assembly using MEMS (Micro Electro Mechanical Systems) technology with device sizes measuring tens or hundreds of microns and feature sizes of about one micron. Each rotational degree of freedom could be implemented using a planar rotating stage produced using standard lithographic techniques (see illustration). Two such rotating stages can be attached at right angles, providing the desired two degrees of rotational freedom for this assembly station. A gripper attached to one rotating stage completes the basic design.
Assembly of the first robotic arm could be done manually using Zyvex's MEMbler™. Click on the illustration at the left to see a video of this process (the picture at the left is one of the first few frames from the video).
|
MEMS assembly conceptualizationMEMbler™ |
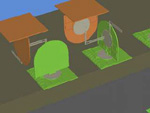
Exponential assembly apparatusRotapod™ |
Having assembled the first robotic arm, it could then assemble further robotic arms in exponentially increasing numbers. Click on the illustration at the right to see a video of the exponential increase in robotic arms (the picture at the right is one of the first few frames from the video). This video illustrates the proposed geometry of a simple two-degree-of-freedom robotic arm being used to assemble a similar robotic arm.
For a more in-depth discussion of exponential assembly, see Dr. George Skidmore's paper, "Exponential Assembly" as submitted to the special Foresight Conference Issue of "Nanotechnology."